Recap
Best First Search
- When deciding which node to expand next, choose node n with minimum value of some evaluation function f(n)
- Priority Queue ordered from low to high by f Example:
- Breadth first search: Expand shallowest node first
- f(n) = Depth(n)
Informed Search
- Search algorithm uses domain specific hints about goals
- Hints formulized from heuristic function h(n)
- h(n) = estimated cost of cheapest path from n to a goal state.
- Idea: Best first search that contains h(n)
Heuristic Function
- Non-negative function that estimates how close a state is to a goal.
- h(n) = 0 if n is a goal state.
- Examples include Manhattan Distance, Euclidian Distance, etc. for path planning.
A* Search
Optimality of A* Search Tree
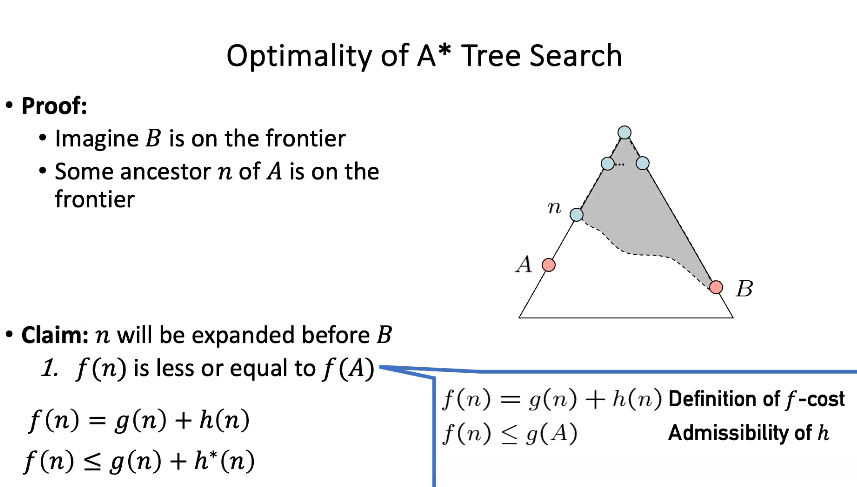
-
- is less than
- expands before
- All ancestors of A will expand before B
- A expands before B
- A* search is optimal
Consistency of Heuristics
Main Idea: estimated heuristic costs actual costs
-
Admissibility
- Heuristic Cost actual cost to goal
- actual cost from n to G
-
Consistency
- heuristic ‘arc’ cost actual cost for each arc
Search and Models
- Your search is only as good as your models.
From Path-Based to Local Search
- So far we have considered search methods that:
- Systematically explore full search space
- Return path from start to goal
- In many problems path is irrelevant; goal is all you care about
- Ex. 8 queens problem
- Sometimes the goal test itself is unclear.
- Ex. optimization problem (you don’t know best value)
- Travelling salesman.
Local Search
- Useful when path to goal state does not matter
- Basic Idea:
- Only keep single “current” state
- Improve iteratively
- Don’t save paths followed
- Characteristics
- Low memory req
- Effective — can find solutions in large spaces
Eight Queens Problem
- Place 8 queens on board such that none can attack one another
- How to formulate search?
- Incremental formulation
- Complete-state formulation
- Heuristic / Objective: Number of attacking queens
Hill Climbing Search
- Consider state-space landscape where:
- Location = state
- Elevation = evaluation of state
- Move towards direction of increasing ‘value’
function HillClimbing(problem) return a state that is a local maximum
current <- initial_state
repeat:
best_neighbor <- current
for state in Neighbors(current):
if state.value > best_neighbor.value:
best_neighbor <- state
if best_neighbor > current.value:
current <- best_neighbor
else:
return current
Challenges for hill-climbing
- Local Maxima
- No way to back track from a local maximum
- Plateau
- Can have difficult time finding a way off flat portion of state space
- Ridges
- Ridges produce series of local maximum that are difficult to navigate out of
Variants of local hill-climbing
- Stochastic hill-climbing
- Select randomly from all moves that improve the value of objective function.
- Random-restart hill-climbing
- Conduct series of hill-climbing searches from random positions
- Very frequently used in AI
Simulated Annealing
- Key Idea: mostly goes “uphill” but occasionally travels “downhill” to escape local optimum
- Likelihood to go downhill is controlled by a “temperature schedule”
function SimulatedAnnealing (problem, schedule) return a solution state
current <- initial_state
from t = 1 to infinity:
T <- schedule(t)
if T = 0 then return current
next <- a randomly selectd neighbor of current
dE = next.value - current.value
if dE > 0:
current <- next
else:
current <- next with probability e^{dE/T}
Local Beam Search
- Similar to hill-climbing but…
- Keep track of k current states, rather than single
- Select k best neighbors among of the k current states
- Stochastic Beam Search - Successors at random weighted by value
Genetic Algorithm
- Fitness Function
- Ex. number of pairs of non-attacking queens
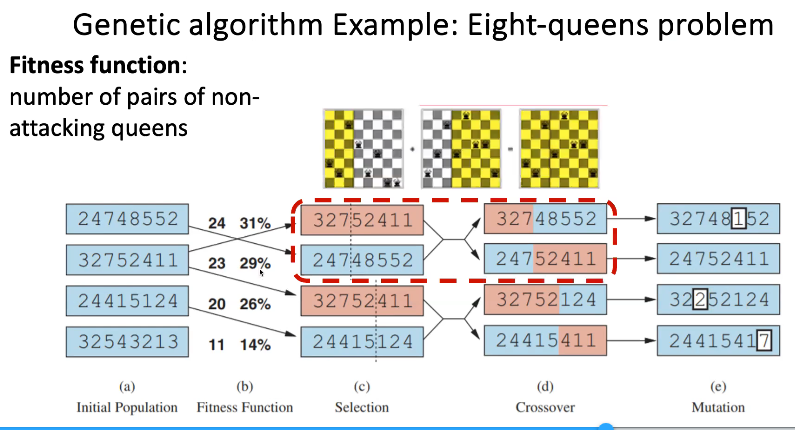
- Ex. number of pairs of non-attacking queens
Applications
Bounding Box Prediction
Object Detection: Single Object Idea: Check all boxes, find the most “cat”
- About H x W positions
- ~H x W window sizes
Hill Climbing Search
- How to represent state?
- Bounding Box:
- Top-left and bottom right corners
- How to define neighborhood?
- …
- Bounding Box:
Example
Problem:
- Place airport such that sum of squared straight-line distances from each city is minimized. Formulation:
- Location of airport
- Cost function
- How to handle continuous state?
- Discretize into intervals of (delta)
- Local search with Empirical Gradient
Gradient Descent
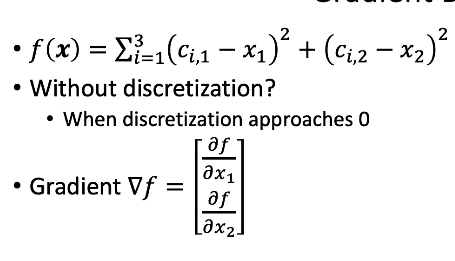
- Move in opposite direction of gradient (steepest slope) in this situation
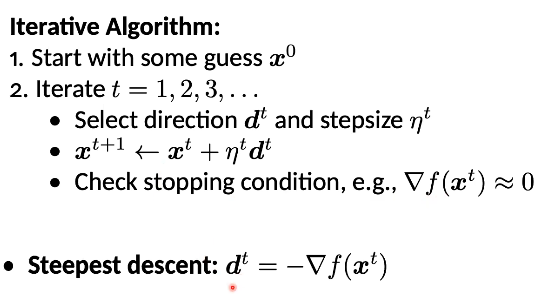
How to choose step size?
- Constant:
- Diminishing: